Μοριοδότηση 2016 - Εσπερινά
Ενδεικτικές απαντήσεις - Εσπερινά και από γραπτά μαθητών
Θέμα Α
Α1 - \(β\)
Α2 - \(γ\)
Α3 - \(β\)
Α4 - \(δ\)
Α5: \(Σ - Λ - Σ - Λ - Λ\)
Θέμα Β
Β2 - \((ι)\)
Επειδή οι πηγές \(Π_1\) \(Π_2\) είναι σύγχρονες, η φάση του φελού από την κάθε πηγή θα είναι:
\(φ_1 = \frac{2πt}{T} - \frac{2πr_1}{λ}\) και \(φ_2 = \frac{2πt}{T} - \frac{2πr_2}{λ}\) αντίστοιχα.
Η διαφορά φάσης \(φ_1 - φ_2\) είναι
\[φ_1 - φ_2 = \frac{2π(r_2-r_1)}{λ} \Rightarrow \frac{π}{3} = \frac{2π(r_2-r_1)}{λ} \Rightarrow r_2 - r_1 = \frac{λ}{6}\]Για το πλάτος ταλάντωσης του φελλού θα ισχύει:
\[|Α'| = |2Α \cdot συν(2π \frac{r_1 - r_2}{2λ})| \Rightarrow |A'| = |2A \cdot συν(- \frac{π}{6})| \Rightarrow |A'| = A \cdot \sqrt3\]Άρα η σωστή απάντηση είναι το \((ι)\)
Β3 - \((ιι)\)
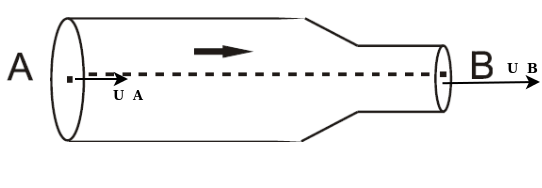
Επειδή το ρευστό είναι ασυμπίεστο και η ροή του είναι στρωτή η παροχή του σωλήνα διατηρείται σταθερή και ισχύει η εξίσωση της συνέχειας:
\[Α_Α \cdot u_A = A_B \cdot u_B \Rightarrow 2 \cdot A_B \cdot u_A = A_B \cdot u_B \Rightarrow 2 \cdot u_A = u_B\]Για ιδανικό ρευστό η κινητική ενέργεια ανά μονάδα όγκου είναι:
\[Λ = \frac{dK}{dV} = \frac{\frac{1}{2} \cdot dm \cdot u^2}{dV} = \frac{1}{2} \cdot ρ \cdot u^2\]α) \(\underline {τρόπος}\)
Εφόσον ο σωλήνας είναι οριζόντιος η εξίσωση του Bernoulli παίρνει την ακούλουθη μορφή:
\[P_A + \frac{1}{2} \cdot ρ \cdot u_A^2 = P_B + \frac{1}{2} \cdot ρ \cdot u_B^2 \Rightarrow P_A - P_B = \frac{1}{2} \cdot ρ \cdot u_B^2 - \frac{1}{2} \cdot ρ \cdot u_A^2\] \[P_A - P_B = \frac{1}{2} \cdot ρ \cdot 4 \cdot u_A^2 - \frac{1}{2} \cdot ρ \cdot u_A^2 = 4Λ - Λ = 3Λ\]β) \(\underline{τρόπος}\)
Θ.Ε.Ε. \(Α \rightarrow B\) για dt:
\[W + W_B = dK\]όπου \(W\) το έργο που προσφέρεται στο τμήμα του ρευστού από το Α στο Β από το περιβάλλον ρευστό, δηλαδή \(W = (P_A - P_B) \cdot dV\), \(W_B = 0\) και
\[dK = \frac{1}{2} \cdot dm \cdot u_B^2 - \frac{1}{2} \cdot dm \cdot u_A^2\]Τελικά
\[(P_A - P_B) \cdot dV = \frac{1}{2} \cdot dm \cdot u_B^2 - \frac{1}{2} \cdot dm \cdot u_A^2 \Rightarrow P_A - P_B = \frac{1}{2} \cdot \frac{dm}{dV} \cdot u_B^2 - \frac{1}{2} \cdot \frac{dm}{dV} \cdot u_A^2\] \[(P_A - P_B) = \frac{1}{2} \cdot ρ \cdot u_B^2 - \frac{1}{2} \cdot ρ \cdot u_A^2 = \frac{1}{2} \cdot ρ (2u_A)^2 - \frac{1}{2} \cdot ρ \cdot u_A^2 = 3 \cdot \frac{1}{2} \cdot ρ \cdot u_A^2 = 3Λ\]Άρα η σωστή απάντηση είναι το \((ιι)\)
Θέμα Γ
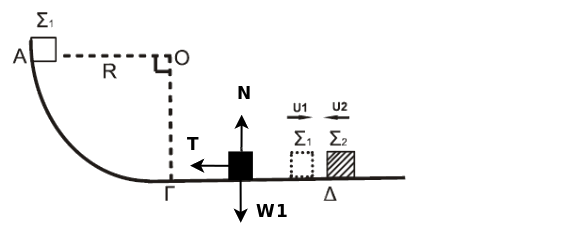
Λείο τεταρτοκύκλιο ΑΓ
R = 5m
μ = 0.5
ΓΔ = \(S_1 = 3.6 m\)
μάζες \(m_2 = 3 \cdot m_1\)
και \(u_2 = 4 \frac{m}{s}\)
Γ1
Α.Δ.Μ.Ε. \((Α,Γ)(m_1)\)
\[Κ_Α + U_A = K_Γ + U_Γ \Rightarrow 0 + m_1 \cdot g \cdot R = \frac{1}{2} \cdot m_1 \cdot u_o^2 + 0 \Rightarrow u_o = \sqrt{2 \cdot g \cdot R} \Rightarrow u_o = 10 \frac{m}{s}\]Γ2
α) \(\underline {τρόπος}\)
Θ.Μ.Κ.Ε. \(Γ \rightarrow Δ (m_1)\)
\[K_Δ - Κ_Γ = W_T \Rightarrow \frac{1}{2} \cdot m_1 \cdot u_1^2 - \frac{1}{2} \cdot m_1 \cdot u_o^2 = -μ \cdot m_1 \cdot g \cdot S_1 \Rightarrow u_1 = 8 \frac{m}{s}\]β) \(\underline {τρόπος}\)
\[ΣF = m \cdot α \Rightarrow T = m \cdot α \Rightarrow μ \cdot m \cdot g = m \cdot α \Rightarrow α = 5 \frac{m}{s^2}\] \[S_1 = u_o \cdot t - \frac{1}{2} \cdot α \cdot t^2 \Rightarrow 5 \cdot t^2 - 20 \cdot t + 7.2 =0\] \[t = \frac{20 \pm 16}{10} = \left\{ \begin{array}{ c l } 0.4 & \\ 3.6, & απορρίπτεται \end{array} \right.\] \[u_1 = u_o - α \cdot t \Rightarrow u_1 = 8 \frac{m}{s}\]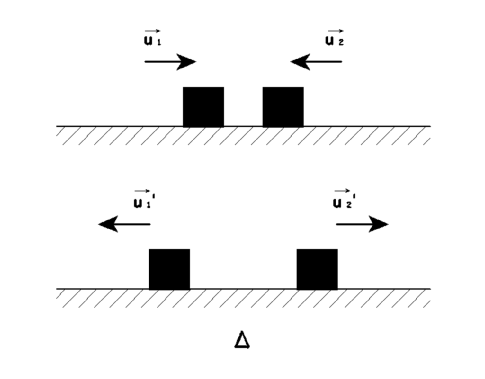
α) \(\underline {τρόπος}\)
Τα \(m_1\), \(m_2\) συγκρούονται στο Δ κεντρικά και ελαστικά. Από ΑΔΟ και ΔΚΕ προκύπτει:
\[u_1' = \frac{2m_2 \cdot(-u_2)+(m_1-m_2) \cdot u_1}{m_1+m_2} = -10 \frac{m}{s} \Rightarrow |u_1'| = 10 \frac{m}{s}\] \[u_2' = \frac{2m_1 \cdot u_1 + (m_2-m_1) \cdot (-u_2)}{m_1+m_2} = +2 \frac{m}{s} \Rightarrow |u_2'| = 2 \frac{m}{s}\]β) \(\underline {τρόπος}\)
ΑΔΟ
\[\vec{p_{πριν}} = \vec{p_{μετά}} \Rightarrow m_1 \cdot u_1 - m_2 \cdot u_2 = -m_1 \cdot u_1' + m_2 \cdot u_2' \Rightarrow u_1' = 4 + 3 \cdot u_2'\]ΔΚΕ
\[\frac{1}{2} \cdot m_1 \cdot u_1^2 + \frac{1}{2} \cdot m_2\cdot u_2^2 = \frac{1}{2} \cdot m_1 \cdot u_1'^2 + \frac{1}{2} \cdot m_2 \cdot u_2'^2 \Rightarrow 112 = u_1'^2 + 3\cdot u_2'^2\]Αντικαθιστώντας την προηγούμενη σχέση φτάνουμε στην δευτεροβάθμια
\[u_2'^2 + 2\cdot u_2' - 8 = 0\] \[u_2' = \frac{-2 \pm 6}{2} = \left\{ \begin{array}{ c l } 2 & \\ -4, & απορρίπτεται \end{array} \right.\]οπότε
\[u_1' = 4 + 3\cdot u_2' \Rightarrow u_1' = 10 \frac{m}{s}\]Γ3
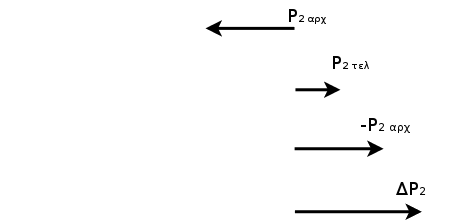
μάζα \(m_2 = 3kg\)
\[\vec{ΔP_2} = \vec{P_{2τελ}} - \vec{P_{2αρχ}} = \vec{P_{2τελ}} + (- \vec{P_{2αρχ}})\] \[ΔP_2 = m_2 \cdot u'_2 - (-m_2 \cdot u_2) = m_2 \cdot (u'_2 + u_2) \Rightarrow ΔP_2 = 18 kg \cdot \frac{m}{s}\]Γ4
Το ποσοστό επι τοις εκατό της μεταβολής της κινητικής ενέργειας του \(m_1\) κατά την κρούση είναι:
\[Π(\%) = \frac{ΔΚ_1}{Κ_{1αρχ}} \cdot 100 \% = \frac{\frac{1}{2} \cdot m_1 \cdot (u_1^{'2} - u_1^2)}{ \frac{1}{2}\cdot m_1 \cdot u_1^2} \cdot 100 \% = (\frac{u_1^{'2}}{u_1^2} - 1)\cdot 100 \% = 56.25 \%\]Θέμα Δ
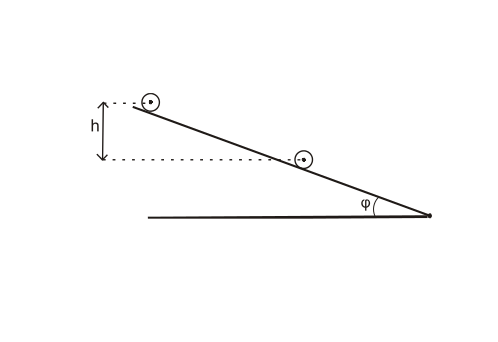
Kεκλιμένο δάπεδο με γωνία κλίσης \(φ = 30^ο\)
μάζα κυλίνδρου \(Μ = 2kg\)
ακτίνα κυλίνδρου \(R = 0.1m\)
ροπή αδράνειας \(I_{cm} = \frac{1}{2} \cdot M \cdot R^2 = 0.01 kg \cdot m^2\)
επιτάχυνση βαρύτητας \(g = 10 \frac{m}{s^2}\)
Δ1
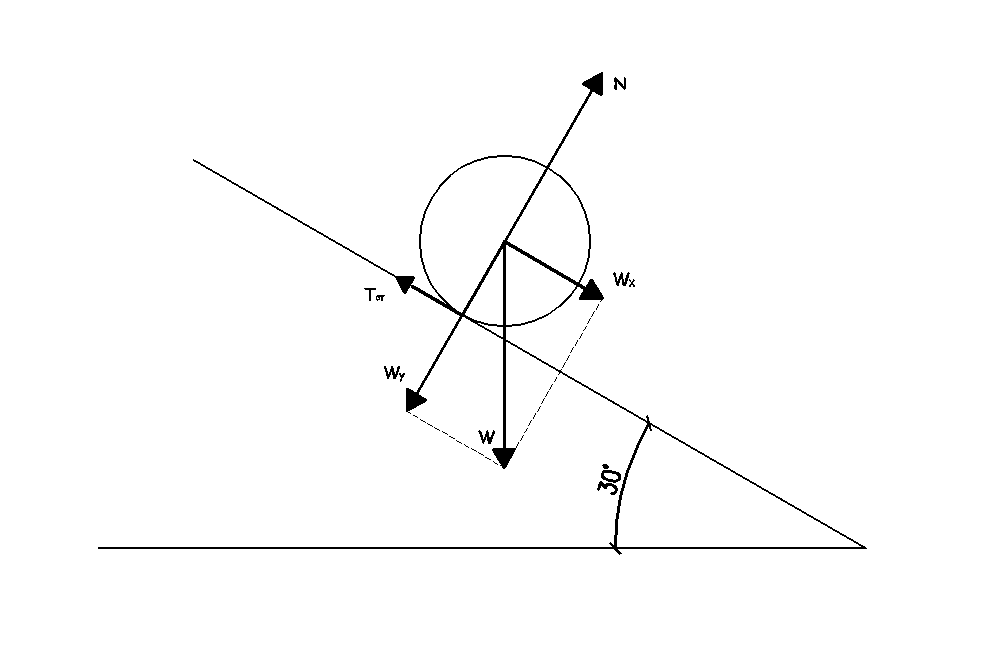
Μεταφορική:
\[M \cdot g \cdot ημφ - Τ_{στ} = Μ \cdot α_{cm}\]Στροφική:
\[Τ_{στ} \cdot R = \frac{1}{2} \cdot M \cdot R^2 \cdot α_{γων} \Rightarrow T_{στ} = \frac{1}{2} \cdot M \cdot α_{cm}\]ΚXO:
\[α_{cm} = α_{γων} \cdot R\]Άρα
\[Μ \cdot g \cdot ημφ = \frac{3}{2} \cdot M \cdot α_{cm} \Rightarrow α_{cm} = \frac{10}{3} \frac{m}{s^2}\]Δ2
Ο κύλινδρος κυλίεται χωρίς να ολισθαίνει και αφού εκτελέσει Ν περιστροφές έχει αποκτήσει γωνιακή ταχύτητα ω.
\[Ν = \frac{12}{π} = \frac{Δθ}{2π} \Rightarrow Δθ = 24 rad\]Για την εύρεση του ω:
α) \(\underline {τρόπος}\)
Από Δ1
\[α_{cm} = α_{γων} \cdot R \Rightarrow α_{γων} = \frac{100}{3} \frac{rad}{s^2}\]Άρα
\[Δθ = \frac{1}{2} \cdot α_{γων} \cdot t^2 \Rightarrow t = 1.2 s\] \[ω = α_{γων} \cdot t = 40 \frac{r}{s}\]οπότε
\[L = 0.01 \cdot 40 \Rightarrow L = 0.4 \frac{kg \cdot m^2}{s}\]β) \(\underline {τρόπος}\)
Κύλιση χωρίς ολίσθηση \(\rightarrow\) η τριβή δεν μετατοπίζει το σημείο εφαρμογής της αφού κάθε στιγμή ασκείται σε διαφορετικό σημείο του κυλίνδρου δηλαδή είναι στατική τριβή.
Στην παραπάνω κίνηση διατηρείται η μηχανική ενέργεια του κυλίνδρου
\[Κ_{αρχ} +U_{αρχ} = Κ_{τελ} +U_{τελ} \Rightarrow 0 + M \cdot g \cdot h = (\frac{1}{2} \cdot M \cdot u_{cm}^2 + \frac{1}{2} \cdot I_{cm} \cdot ω^2) + 0\] \[h = x_{cm} \cdot ημφ\] \[x_{cm} = {Δθ}{R}\]άρα \(h = 24 \cdot 0.1 \cdot \frac{1}{2} \Rightarrow h = 1.2m\)
\[u_{cm} = ω \cdot R\]αντικαθιστώντας έχουμε
\[2 \cdot 10 \cdot 1.2 = \frac{1}{2} \cdot 2 \cdot ω^2 \cdot 0.01 + \frac{1}{2} \cdot 0.01 \cdot ω^2 \Rightarrow ω = 40 \frac{r}{s}\]Η στροφορμή που θα έχει ο κύλινδρος θα είναι
\[L = I_{cm} \cdot ω\] \[I_{cm} = \frac{1}{2} M \cdot R^2 = 0.01 kg m^2\]Δ3
Για κατακόρυφη μετατόπιση \(h = 1.2 m\) θα έχουμε:
\[h = x_{cm} \cdot ημφ \Rightarrow x_{cm} = 2.4 m\] \[x_{cm} = \frac{1}{2} \cdot α_{cm} \cdot t^2 \Rightarrow t = 1.2 s\]Κύλιση χωρίς ολίσθηση:
\[α_{cm} = α{γων} \cdot R \Rightarrow α_{γων} = \frac{100}{3} \frac{rad}{s^2}\]α) \(\underline {τρόπος}\)
\[\frac{dK}{dt} = \frac{dK}{dt}_{μετ} + \frac{dK}{dt}_{περ} = ΣF \cdot u_{cm} + Στ \cdot ω = Μ \cdot α_{cm} \cdot u_{cm} + I \cdot α_{γων} \cdot ω\] \[\frac{dK}{dt} = Μ \cdot α_{cm}^2 \cdot t' + I \cdot α_{γων}^2 \cdot t' \Rightarrow \frac{dK}{dt} = 40 \frac{J}{s}\]β) \(\underline {τρόπος}\)
\[\frac{dK}{dt} = \frac{dK}{dt}_{μετ} + \frac{dK}{dt}_{περ} = (W_x - T_{στ}) \cdot u_{cm} + (T_{στ} \cdot R) \cdot ω\]ΚΧΟ:
\[u_{cm} = ω \cdot R\]άρα
\[\frac{dK}{dt} = W_x \cdot u_{cm} - T_{στ} u_{cm} + T_{στ} u_{cm} = W_x \cdot u_{cm} \Rightarrow \frac{dK}{dt} = 40 \frac{J}{s}\]γ) \(\underline {τρόπος}\)
\[Κ = \frac{1}{2} \cdot M \cdot u^2 + \frac{1}{2} \cdot I \cdot ω^2 = \frac{1}{2} \cdot M \cdot ω^2 \cdot R^2 + \frac{1}{2} \cdot \frac{1}{2} \cdot M \cdot R^2 ω^2 = \frac{3}{4} \cdot M \cdot R^2 ω^2\]Αφού \(ω = α_{γων} \cdot t\)
\[K = \frac{3}{4} \cdot M \cdot R^2 \cdot α_{γων}^2 \cdot t^2 = \frac{100}{6} \cdot t^2\]Ο ρυθμός μεταβολής της κινητικής ενέργειας είναι:
\(\frac{dK}{dt} = \frac{100}{6} \cdot 2 \cdot t = \frac{100}{3} \cdot t\) (SI)
και για \(t=1.2s\)
\(\frac{dK}{dt} = 40 \frac{J}{s}\) (SI)
δ) \(\underline {τρόπος}\)
Έστω \(Α\) το σημείο επαφής του κυλίνδρου με το κεκλιμένο επίπεδο. Θεωρούμε στιγμιαίο άξονα περιστροφής οριζόντιο που διέρχεται από το σημείο \(Α\). Ο κύλινδρος εκτελεί μόνο περιστροφική κίνηση γύρω από τον στιγμιαίο άξονα περιστροφής.
Θεώρημα παραλλήλων αξόνων
\[Ι_Α = Ι_{cm} + M \cdot R^2 \Rightarrow I_A = \frac{1}{2} \cdot M \cdot R^2 + M \cdot R^2 \Rightarrow I_A = \frac{3}{2} \cdot M \cdot R^2\] \[Στ = Ι_Α \cdot α_{γων} \Rightarrow M \cdot g \cdot ημφ = \frac{3}{2} \cdot M \cdot R^2 \Rightarrow α_{γων} = \frac{100}{3} \frac{rad}{s^2}\] \[\frac{dK}{dt} = Στ \cdot ω = Ι_Α \cdot α_{γων} \cdot α_{γων} \cdot t = \frac{3}{2} \cdot M \cdot R^2 \cdot α_{γων}^2 \cdot t \Rightarrow \frac{dK}{dt} = 40 \frac{J}{s}\]Δ4
Για την στατική τριβή έχουμε
\[Τ_{στ} \leq μ \cdot N \Rightarrow \frac{1}{2} \cdot M \cdot α_{cm} \leq μ \cdot M \cdot g \cdot συνφ \Rightarrow \frac {\sqrt3}{4} \leq μ\]άρα η ελάχιστη τιμή του συντελεστή οριακής στατικής τριβής είναι
\[μ_{min} = \frac {\sqrt3}{4}\]blog comments powered by Disqus